03Professional Experience
System Designer | IMA (Integrated Modular Avionics)
Airbus Commercial Aircraft, Toulouse
Working on the Integrated Modular Avionics shared resources platform for Airbus commercial aircraft, with a focus on CPIOM and CRDC module integration, hosted applications, AFDX Network and system-level configuration.
- Integrate CPIOM and CRDC modules within a distributed avionics computing architecture based on Airbus' IMA shared resources platform
- Manage hosted-application constraints across time, memory, communication and system-level configuration resources
- Generate and validate configuration tables and MCCT loads supporting embedded avionics module integration
- Produce V&V documentation for lab/flight tests and certification activities, while supporting ATA users on integration issues
R&T Project Coordinator / System Engineer
AIRBUS Research & Technology, Aircraft of Tomorrow Division
Contributed to Airbus R&T activities within Clean Sky 2, a €600M European research program developing next-generation propulsion, energy systems and aircraft configurations for cleaner aviation.
- Led the technical synthesis of 16 demonstrators covering propulsion, energy management and aircraft architecture
- Consolidated inputs from 30+ European partners and produced a 600-page final report for the Clean Sky Joint Undertaking
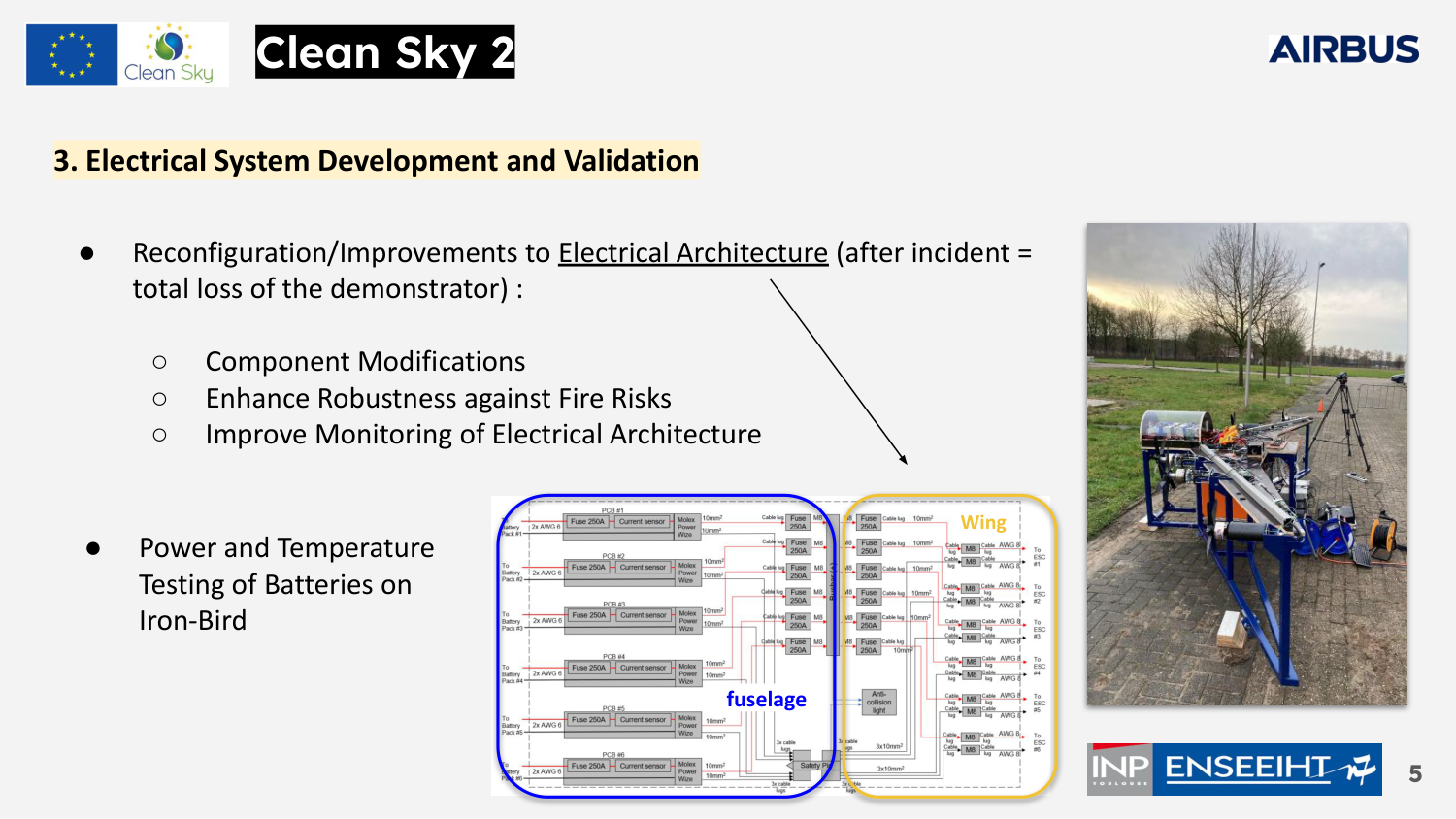
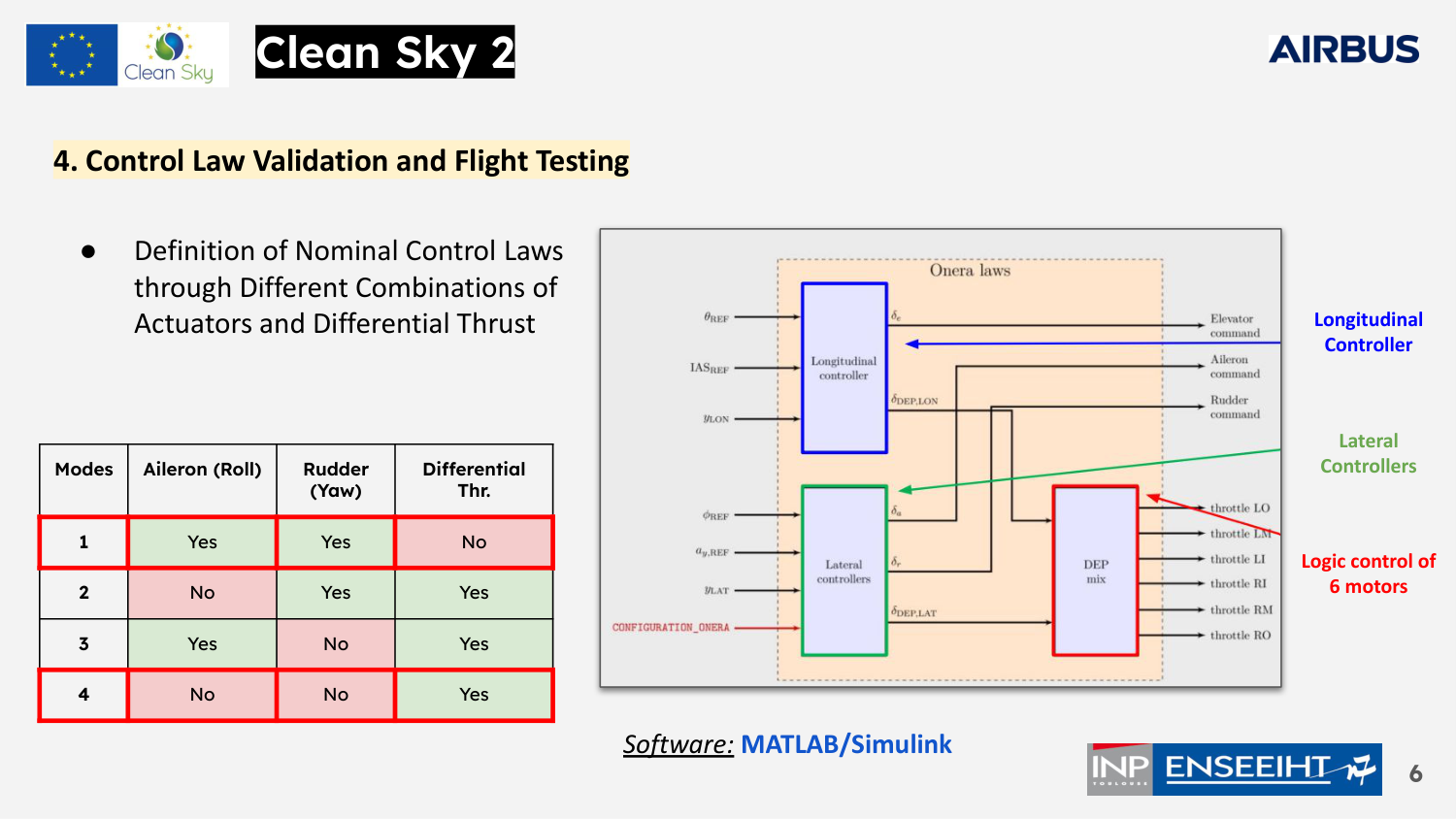
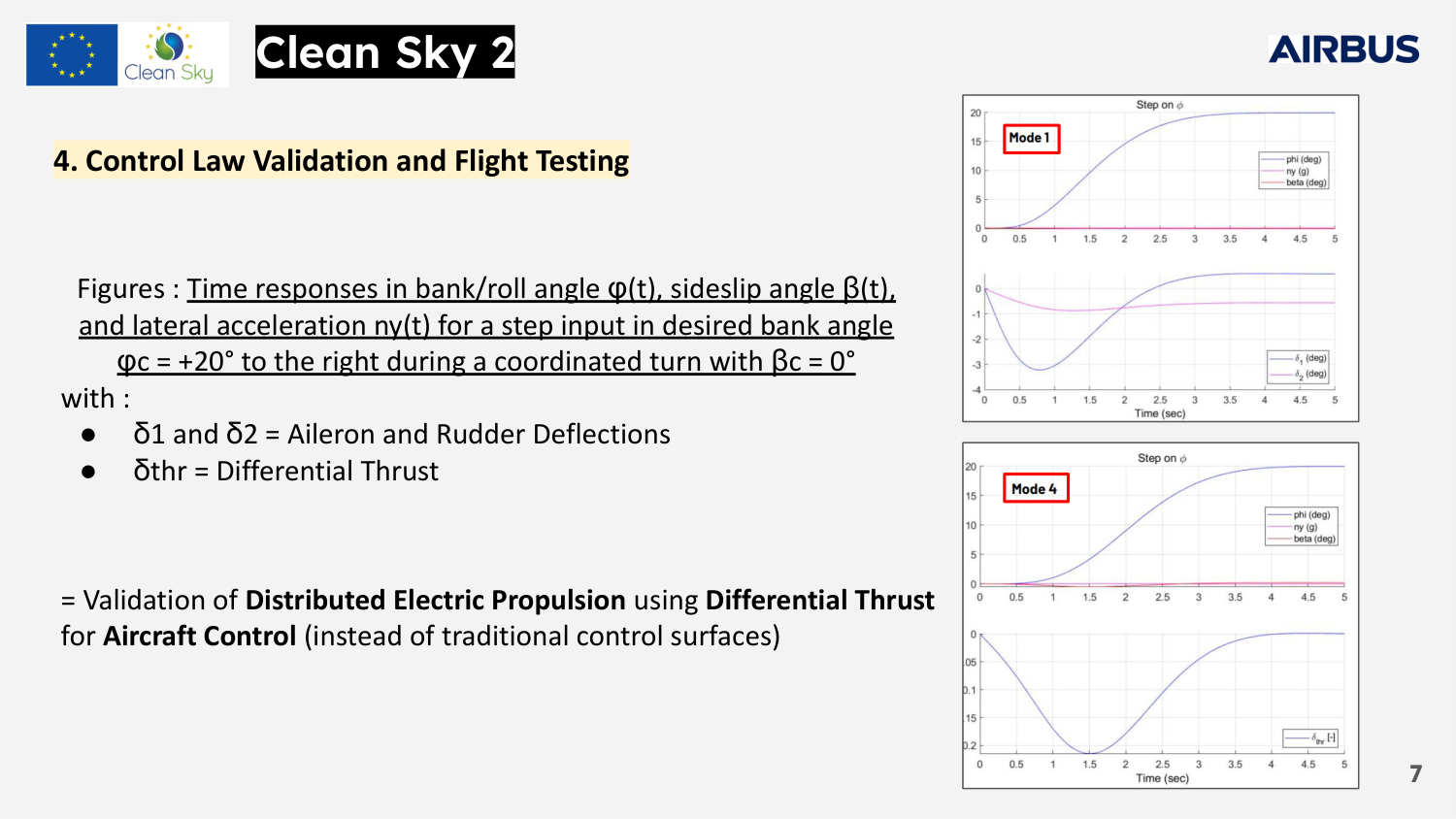
- Contributed to system-level design of a 1:8.5 scale Distributed Electric Propulsion demonstrator: aero-propulsive interactions, electrical system architecture, batteries, power distribution (Iron Bird testing), control law architecture including lateral and longitudinal controllers and DEP thrust-mixing logic
Stream 1: Engine N+1
- UltraFan Demonstrator: Validate performance of Rolls-Royce UltraFan engine (geared turbofan with 15:1 bypass ratio and 140-inch diameter)
- SAFARI: Address UHBR engine integration challenges by analyzing noise generation, aerodynamic efficiency, and structural dynamics
- Non Propulsive Energy: Optimize fuel efficiency using APU to supply energy during ground and descent phases
- Active Vibration Control: Reduce cockpit/cabin noise through controlled engine noise and fuselage vibrations
Stream 2: Engine N+2
- Open Rotor & Stator: Explore new engine concepts and enhance eco-viability of Open Rotors
- Active Flow Control: Recover lift lost due to larger engine diameters, reducing mass flow requirements by over 50%
- Boundary Layer Ingestion: Capture energy from boundary layer to reduce thrust requirements
- Techno-Bricks: Develop essential technologies for future propulsion systems
- Numerical Cross Demo: Develop numerical tools to predict aerodynamic, acoustic, and elastic behaviors
Stream 3: Laminarity
- HLFC Tails Plane: Implement Hybrid Laminar Flow Control on high-sweep profiles above Mach 0.82
- NLF Bizjets HTP: Design Natural Laminar Flow architecture for business jet horizontal tail plane
- HLFC Wing: Develop simplified HLFC concept for long-range wings to reduce CO2 emissions
Stream 4: Radical Aircraft Configuration
- Advanced Rear End: Innovative rear fuselage design to reduce drag and fuel consumption
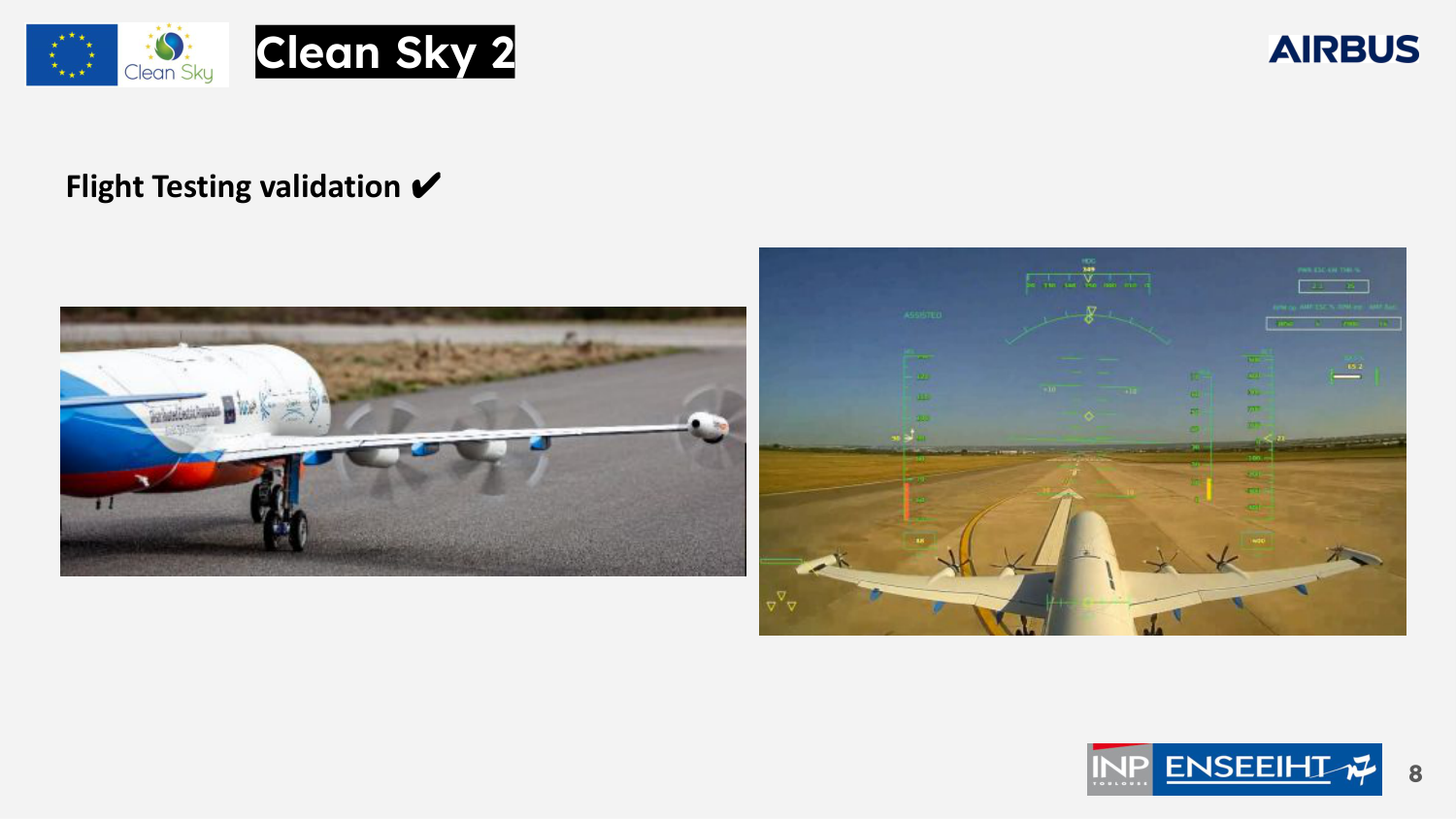
- Scaled Flight Demonstrator: 1:8.5 scale unmanned aircraft, 4m wingspan, 6 electric propellers, M=167kg, V=185km/h
- Hybrid Electric Propulsion: 2.5 MW hybrid system combining gas turbine with electric generator/motor
- Distributed Electric Propulsion: Validate DEP concept using differential thrust for aircraft control
Robotics Research Engineer
Institute for Experiential Robotics, RIVeR LAB, Northeastern University, Boston
"Avatar" Project (collab. MIT & Brown University)
- Built a ROS/RViz 3D simulation environment for teleoperation research, replicating robot behavior and operator interactions
- Developed real-time data pipelines for AI model training and haptic feedback tuning within the Avatar project
Hybrid Energy Systems Engineer
AKKODIS, Power System & Green Energy Division
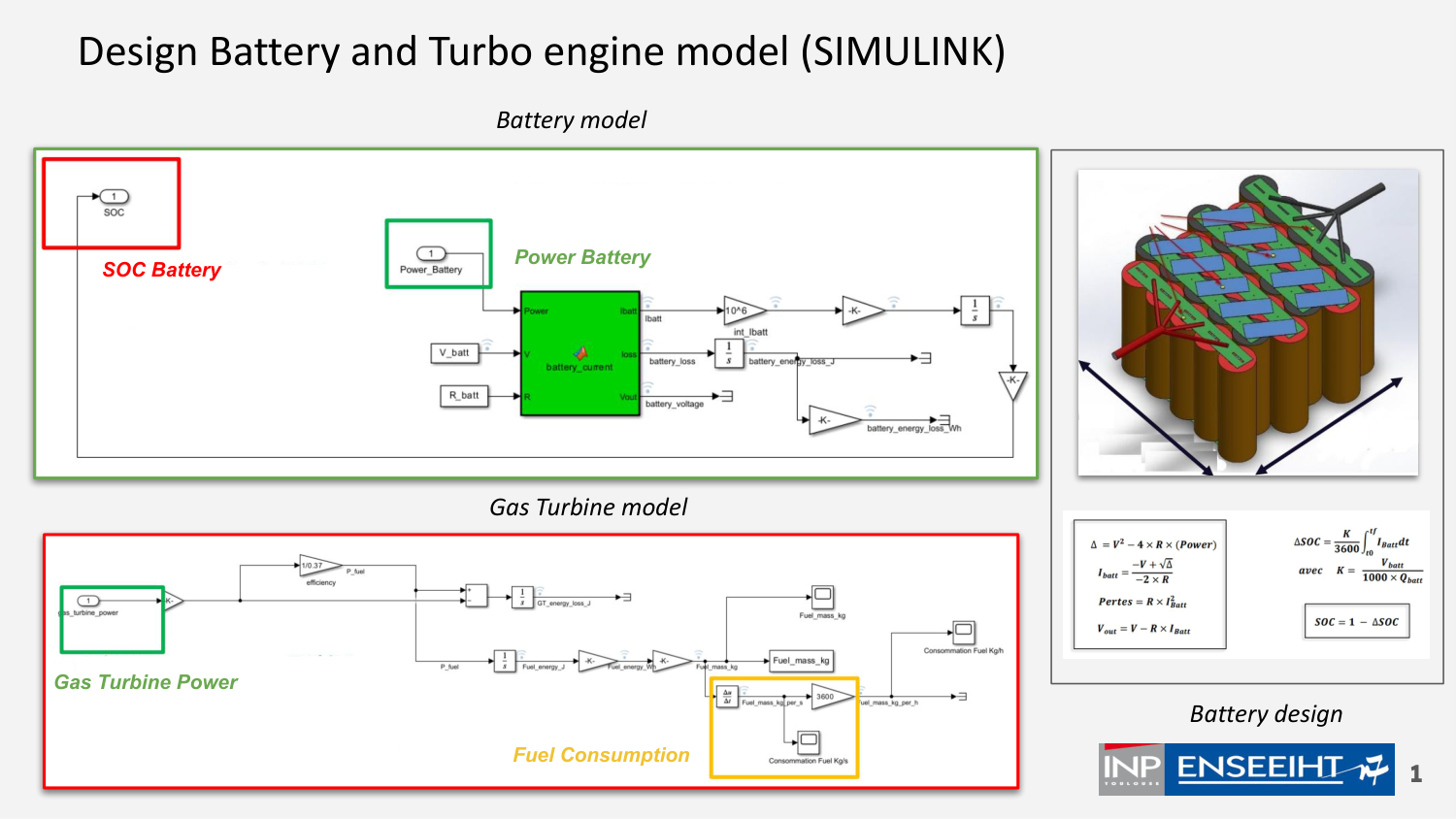
- Developed dynamic models of lithium-ion batteries and gas turbines for hybrid aircraft architectures using MATLAB/Simulink
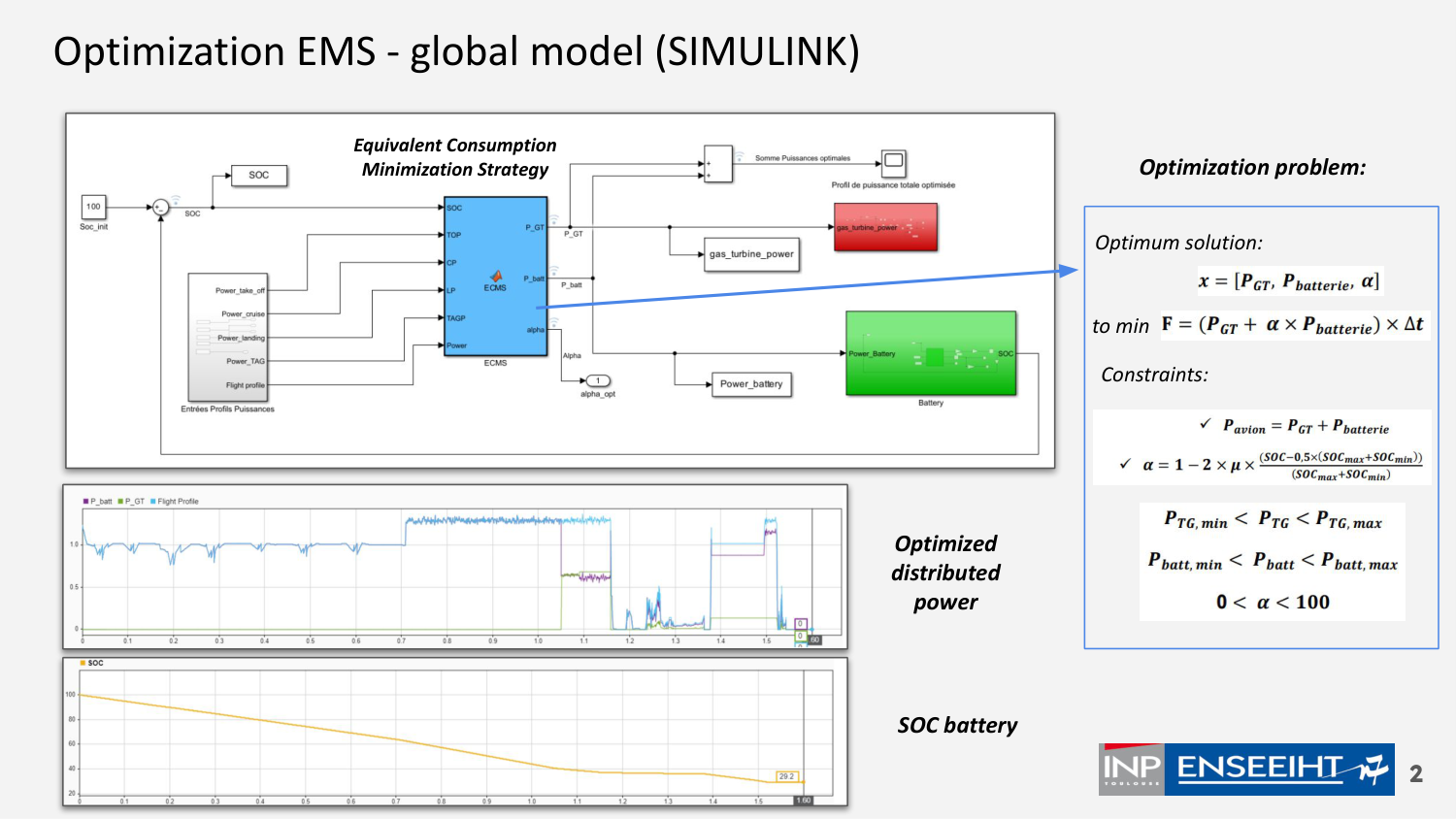
- Designed an ECMS-based energy management strategy to optimize energy consumption across mission scenarios
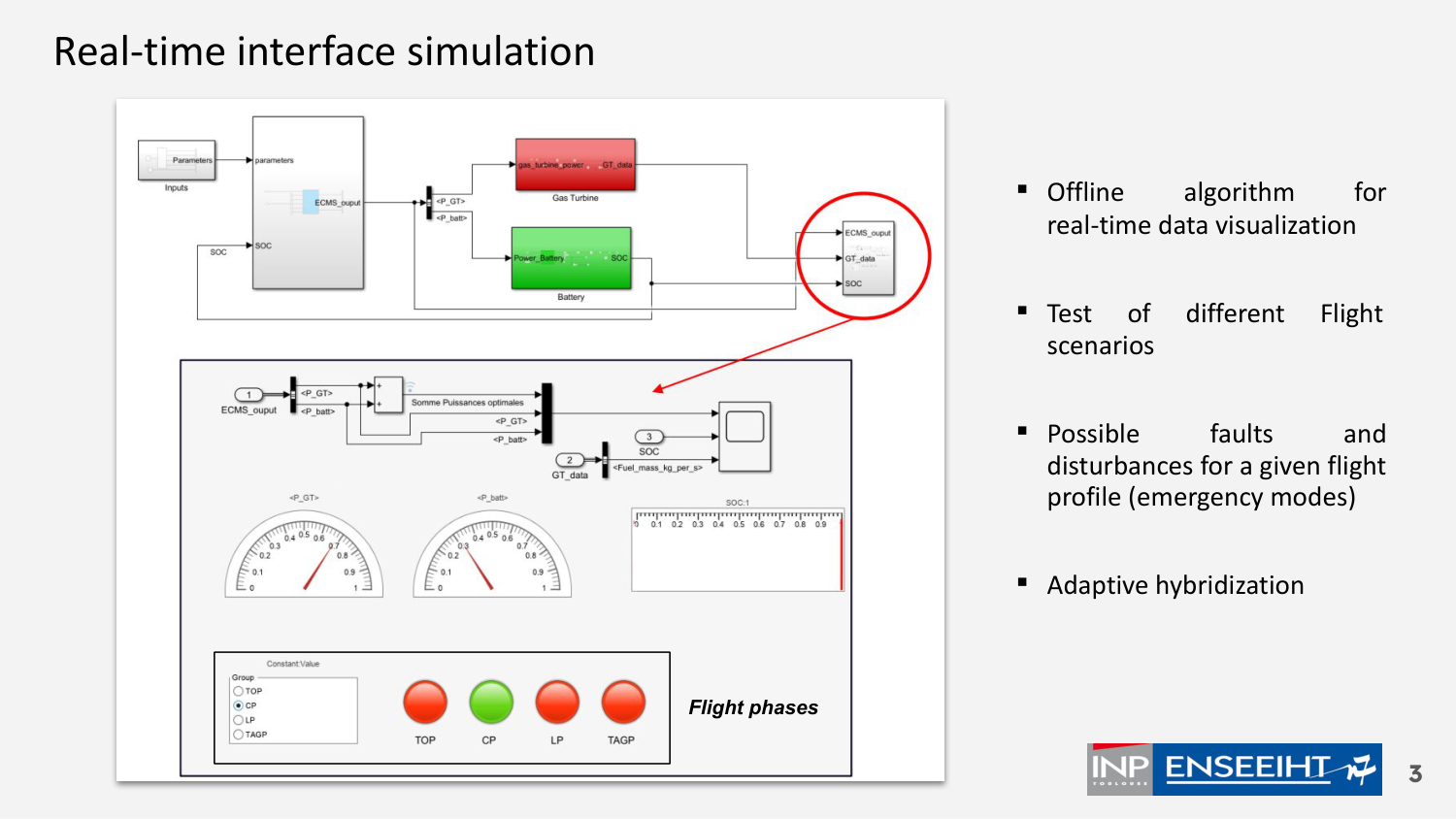
- Built a real-time simulation interface to test EMS performance under critical flight conditions using Simulink RT
- Analysed system-level trade-offs between energy performance, propulsion behavior and operational constraints
Optimization Problem: Minimize equivalent fuel consumption subject to battery SOC constraints and power distribution between gas turbine and battery systems